2023 sah ich auf der Comic Con Stuttgart wie mehrere Astromechdroiden (Star Wars)
herum fuhren. Alle gesteuert von Menschen die eine Ziegelstein große Fernbedienung mit sich trugen. In dem Moment dachte ich mit das geht doch besser und vor allem ohne Fernbedienung.
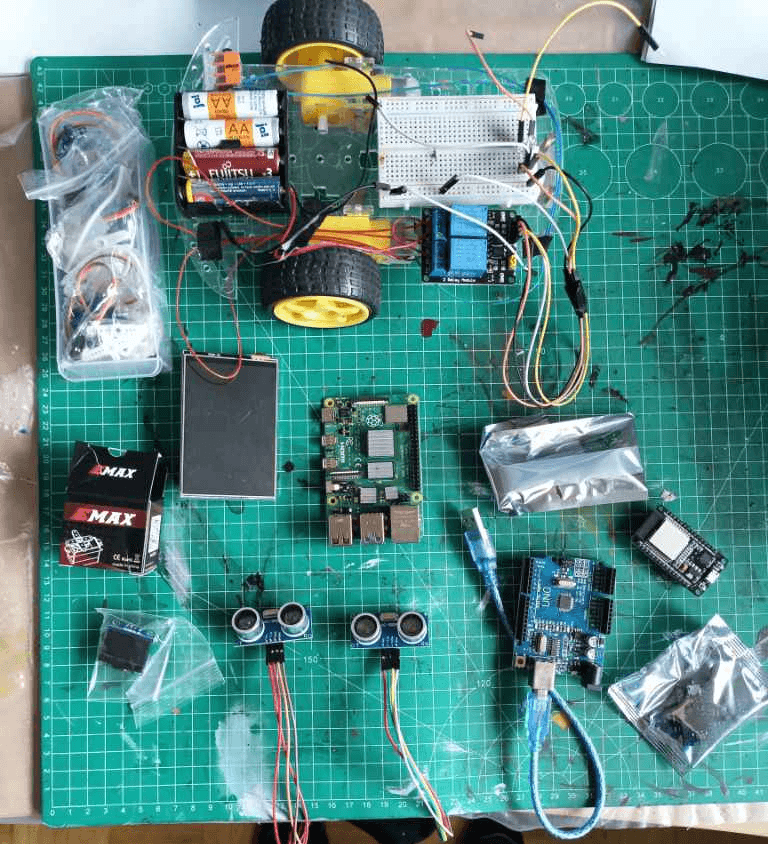
So kam es das ich mich über weitere Steuerungssysteme informierte. Aus meiner Ausbildung waren mir nur Logo-soft und SPS bekannt. In meinem Fachabi habe ich ein Fotometer gebaut und durch Zufall noch einen ESP8266 herumliegen gehabt. Welchen ich als Basis nutzen wollte.
Der Name war für mich ohne hin schon klar der Roboter soll Dale heißen, der Name kam zustande über einen insider Witz auf einem Discord server.